Description
🔧 30A ESC SimonK Firmware – Electronic Speed Controller for Brushless Motors
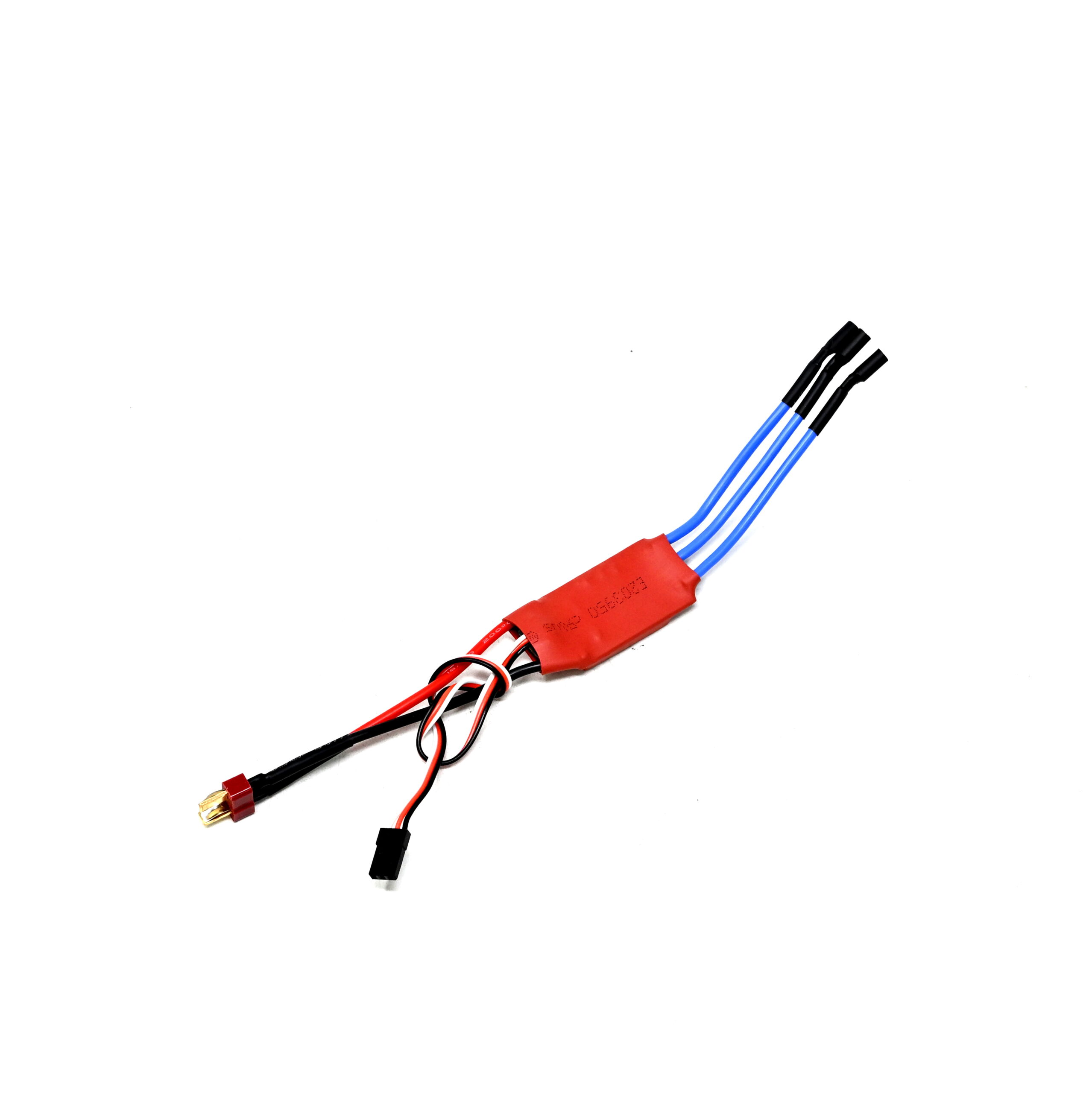
The 30A ESC with SimonK Firmware is a high-performance electronic speed controller designed for brushless DC motors in drones, quadcopters, RC aircraft, and multi-rotor applications. Pre-flashed with the popular SimonK firmware, this ESC delivers ultra-fast throttle response, smooth motor control, and optimized performance for multi-rotor flight. Rated at 30A continuous current with 40A burst capability, it supports 2-4S LiPo batteries and features BEC output, compact design, and excellent heat dissipation. Perfect for 450-550mm quadcopters, FPV racing drones, and RC planes requiring reliable, responsive motor control.
✨ Key Highlights
- ⚡ 30A Continuous Current – 40A burst capability (10 seconds)
- 🔄 SimonK Firmware – Fast response, optimized for multi-rotors
- 🔋 2-4S LiPo Compatible – 7.4V-14.8V input voltage range
- 🔌 5V/2A BEC Output – Powers receiver and flight controller
- ⚖️ Lightweight – ~25 grams compact design
- 🌡️ Heat Protection – Thermal cutoff prevents damage
- 🔇 Silent Operation – Low noise, smooth motor drive
- 🚁 Multi-Rotor Optimized – Fast refresh rate for stability
- 🔧 Easy Programming – Throttle calibration, settings adjustable
- 💰 Cost-Effective – Great performance-to-price ratio
📊 Technical Specifications
| ⚡ Continuous Current |
30A |
| 🔥 Burst Current |
40A (10 seconds max) |
| 🔋 Input Voltage |
2-4S LiPo (7.4V-14.8V) |
| 🔌 BEC Output |
5V / 2A (Linear or SBEC) |
| 📡 Firmware |
SimonK (pre-flashed) |
| 🔄 Refresh Rate |
8kHz (ultra-fast response) |
| ⚖️ Weight |
~25 grams |
| 📏 Dimensions |
~45×25×10mm (approx) |
| 🔌 Input Connector |
XT60 or bullet connectors |
| 🔌 Motor Wires |
16-18 AWG silicone (3 wires) |
| 🌡️ Operating Temp |
-20°C to +60°C |
| 🛡️ Protections |
Over-current, thermal, low voltage |
🔄 SimonK Firmware Features
| Ultra-Fast Response |
8kHz refresh rate for instant throttle changes |
| Multi-Rotor Optimized |
Designed specifically for quadcopters/multi-rotors |
| Smooth Control |
Eliminates motor jitter and cogging |
| Active Braking |
Quick motor stopping for better control |
| No Startup Delay |
Immediate motor response on throttle up |
| Low Latency |
Minimal delay between input and motor response |
| Open Source |
Community-developed, well-tested firmware |
🆚 SimonK vs BLHeli Firmware
| Feature |
SimonK |
BLHeli |
| Response Speed |
✅ Very fast (8kHz) |
✅ Very fast (configurable) |
| Multi-Rotor Use |
✅ Optimized |
✅ Optimized |
| Configuration |
⚠️ Limited options |
✅ Extensive options |
| Programming |
Throttle stick only |
Via software interface |
| Startup |
✅ Smooth |
✅ Smooth |
| Best For |
Simple, reliable setups |
Advanced tuning needs |
🎯 Perfect For
- 🚁 Quadcopters – 450-550mm frames with 2212/2216 motors
- ✈️ RC Airplanes – Small to medium fixed-wing aircraft
- 🎮 FPV Racing Drones – Fast response for racing applications
- 📹 Camera Drones – Smooth, stable flight for aerial photography
- 🤖 Hexacopters – Multi-rotor platforms (6 ESCs needed)
- 🔧 DIY Drone Builds – Reliable ESC for custom projects
- 🏎️ RC Cars/Boats – High-speed brushless applications
- ⚙️ Robotics – Precise motor control for robots
🔋 Battery & Motor Compatibility
| Battery |
Motor Size |
Application |
| 2S (7.4V) |
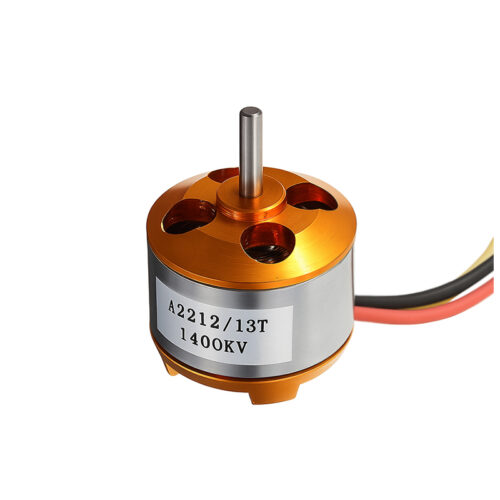
2212-2216 (1000-1400KV) |
Long flight time, efficiency |
| 3S (11.1V) |
2212-2216 (800-1400KV) |
Balanced performance (most common) |
| 4S (14.8V) |
2208-2212 (600-1000KV) |
High power, heavy lift |
🔧 Required Components
- 🔄 Brushless Motor – 2208-2216 size (drawing max 30A)
- 🔋 LiPo Battery – 2-4S (7.4V-14.8V), 2200-5000mAh
- 📡 RC Receiver – For throttle signal input
- 📻 Transmitter – Radio controller for pilot input
- 🔌 Connectors – Bullet connectors (3.5mm), XT60/XT90 battery
- 🚁 Flight Controller – For multi-rotor (optional but recommended)
- 🔩 Mounting – Velcro, zip ties, or mounting brackets
✅ Key Advantages
- ⚡ SimonK Firmware – Pre-flashed, optimized for multi-rotors
- 🔄 Ultra-Fast Response – 8kHz refresh for instant throttle changes
- 💪 30A Continuous – Handles most 450-550mm quad motors
- 🔋 Built-in BEC – 5V/2A powers receiver & flight controller
- 🌡️ Heat Protection – Automatic thermal shutdown prevents damage
- 🔇 Smooth Operation – No motor stuttering or cogging
- 💰 Affordable – Great value for SimonK performance
- ⚖️ Lightweight – Only ~25g doesn’t add much weight
- 🔧 Easy Setup – Simple throttle calibration process
- 🛡️ Multiple Protections – Over-current, thermal, low-voltage cutoff
⚠️ Important Notes
- ⚡ 30A Maximum – Do not exceed 30A continuous (40A burst max 10s)
- 🔋 Voltage Range – Only use 2-4S LiPo (7.4V-14.8V)
- 🔌 BEC Limit – Max 2A output, don’t overload with servos
- 🌡️ Cooling – Ensure adequate airflow during operation
- 🔧 Calibration Required – Must calibrate ESC endpoints before first use
- 🔌 Motor Wiring – Any 2 wires swapped reverses motor direction
- ⚠️ Low Voltage Cutoff – Set correctly to protect LiPo battery
- 🛡️ ESC Mounting – Secure properly, avoid vibration contact
🔧 Throttle Calibration Process
| 1. Disconnect Battery |
Ensure ESC has no power, motor disconnected for safety |
| 2. Transmitter Full Throttle |
Move throttle stick to maximum position |
| 3. Connect Battery |
Plug in LiPo while holding full throttle |
| 4. Listen for Beeps |
ESC will beep confirming high point |
| 5. Move to Low Throttle |
Move stick to minimum position |
| 6. Confirmation Beeps |
ESC beeps confirming low point |
| 7. Calibration Complete |
ESC now knows throttle range, ready to use |
🔍 Troubleshooting
| Motor Won’t Start |
Check battery voltage, ESC calibration, connections |
| Continuous Beeping |
Low voltage cutoff triggered, charge battery |
| Motor Stuttering |
Re-calibrate ESC, check motor connections |
| ESC Overheating |
Motor drawing too much current, reduce prop size |
| No BEC Output |
BEC damaged, ESC may need replacement |
| Wrong Direction |
Swap any 2 of 3 motor wires |
| Delayed Response |
Check transmitter trim, re-calibrate throttle |
💡 Pro Tips
- 🔧 Always Calibrate – Calibrate ESC with your transmitter before first flight
- 🌡️ Airflow Cooling – Mount ESC in airflow path for cooling
- 🔋 Quality Batteries – Use good LiPo batteries with proper C-rating (30C+)
- 🔌 Solid Connections – Solder all connections, use heat shrink tubing
- ⚖️ Match ESCs – Use identical ESCs on multi-rotor for balanced performance
- 📏 Current Testing – Use watt meter to verify actual current draw
- 🛡️ Secure Mounting – Use zip ties or velcro, avoid hard mounting (vibration)
- 🔋 LVC Settings – Set low voltage cutoff appropriate for battery type
🔋 Low Voltage Cutoff (LVC) Settings
| 2S LiPo (7.4V) |
Set LVC to 6.4V (3.2V per cell) |
| 3S LiPo (11.1V) |
Set LVC to 9.6V (3.2V per cell) |
| 4S LiPo (14.8V) |
Set LVC to 12.8V (3.2V per cell) |
🔌 Wiring Connections
| Battery Input |
Red (+) and Black (-) to LiPo battery (XT60/XT90) |
| Motor Output |
3 wires to brushless motor (any order initially) |
| Signal Wire |
3-pin servo connector to receiver throttle channel |
| BEC Output |
5V/GND from signal connector powers receiver |
📦 Package Contents
- ✅ 1x 30A ESC with SimonK Firmware (pre-flashed)
- ✅ Pre-soldered input wires (battery connection)
- ✅ Pre-soldered motor output wires (3 wires)
- ✅ Servo connector for receiver (signal + BEC)
- ⚠️ Note: Battery and connectors sold separately
- ⚠️ Note: Brushless motor sold separately
- ⚠️ Note: Heat shrink tubing may be included (varies)
- ⚠️ Note: Instruction manual may vary by manufacturer
🎓 Example Quadcopter Setup
- 🚁 450mm Quad – 4× 30A ESC, 4× 2212 1000KV motors, 3S 2200mAh, 10″ props
- 🚁 550mm Quad – 4× 30A ESC, 4× 2216 900KV motors, 3S 3300mAh, 11″ props
- 🎮 FPV Racer – 4× 30A ESC, 4× 2204 2300KV motors, 3S 1500mAh, 5″ props
- 📹 Camera Platform – 4× 30A ESC, 4× 2212 1000KV motors, 4S 5000mAh, 10″ props
🔧 Specifications Summary
- ⚡ Current Rating – 30A continuous, 40A burst (10 seconds)
- 🔋 Voltage – 2-4S LiPo (7.4V-14.8V nominal)
- 🔌 BEC – 5V / 2A linear regulator
- 📡 Firmware – SimonK (8kHz refresh rate)
- ⚖️ Weight – Approximately 25 grams
- 🛡️ Protection – Over-current, thermal, low voltage cutoff
- 🔧 Programming – Throttle stick calibration method
🛡️ Product Information
✅ 30A ESC with SimonK Firmware – Electronic Speed Controller
✅ Continuous current: 30A, Burst: 40A (10 seconds max)
✅ Input voltage: 2-4S LiPo (7.4V-14.8V)
✅ BEC output: 5V / 2A for receiver and flight controller
✅ SimonK firmware pre-flashed – optimized for multi-rotors
✅ Ultra-fast response: 8kHz refresh rate
✅ Weight: ~25 grams compact design
✅ Protection: Over-current, thermal shutdown, low voltage cutoff
✅ Compatible with: 2208-2216 brushless motors
✅ Applications: Quadcopters, drones, RC planes, multi-rotors
✅ Active braking for quick motor stopping
✅ No startup delay for instant throttle response
⚠️ Important: Requires throttle calibration before first use. Maximum continuous current: 30A (do not exceed). Use 2-4S LiPo only (7.4V-14.8V). BEC maximum: 2A output – do not overload. Ensure adequate cooling/airflow during operation. Set low voltage cutoff appropriate for battery (3.2V per cell). Motor direction changed by swapping any 2 of 3 motor wires. For multi-rotor, use identical ESCs for balanced performance. Compatible with all standard brushless motors. Requires battery, motor, and receiver (sold separately).