Description
🔧 ESC Power Distribution Board (PDB) – Integrated Power Distribution System for Multi-Rotors
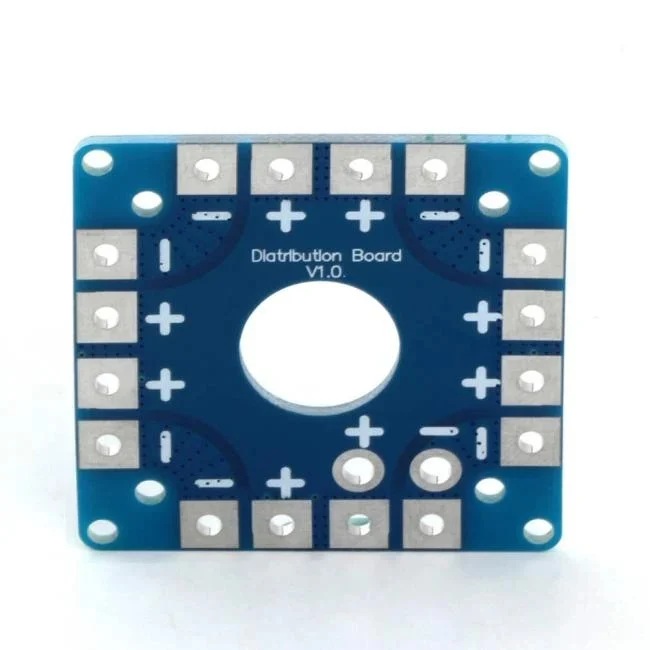
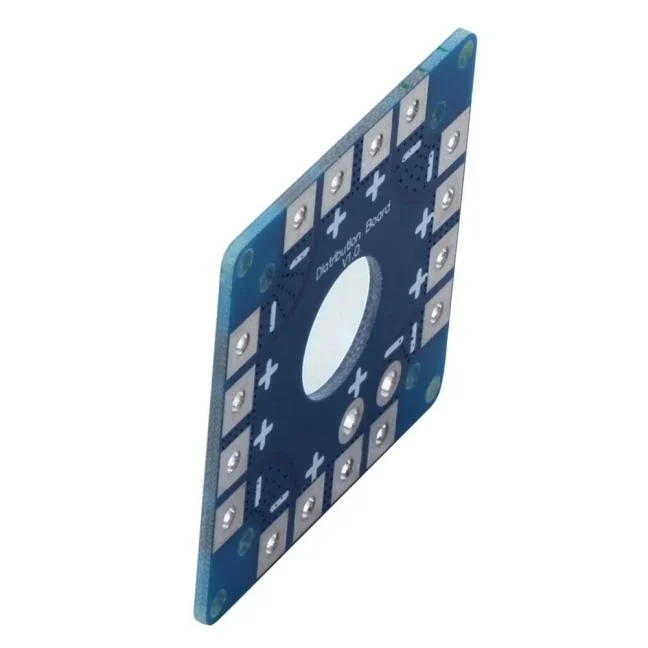
The ESC Power Distribution Board (PDB) is a compact, efficient power management solution designed for quadcopters, hexacopters, and multi-rotor drones. This integrated board combines power distribution with built-in ESC outputs, eliminating the need for separate ESCs and reducing weight, wiring complexity, and points of failure. Featuring simultaneous power delivery to 4-8 motors with integrated voltage regulation (typically 5V/12V BEC outputs), overcurrent protection, and clean PCB design for minimal interference. Perfect for DIY builds, racing drones, compact frames, aerial photography platforms, and hobbyists seeking streamlined electronics with professional reliability.
✨ Key Highlights
- ⚡ Integrated ESCs – 4-8 built-in electronic speed controllers
- 🔌 Power Distribution – Single battery connection to all motors
- 🔋 Built-in BEC – 5V/12V voltage regulators for FC and accessories
- 📦 Clean Installation – Reduces wiring clutter significantly
- ⚖️ Lightweight Design – Lighter than 4 separate ESCs
- 💪 High Current Rating – Typically 20-30A per channel
- 🛡️ Overcurrent Protection – Built-in safety features
- 🔧 Easy Mounting – Standard 30.5×30.5mm or 45×45mm hole spacing
- 📡 Low Interference – Optimized PCB layout reduces EMI
- 💰 Cost Effective – Often cheaper than buying 4 separate ESCs
📊 Technical Specifications (Typical)
| ⚡ ESC Channels |
4 (quadcopter) or 6-8 (hex/octo) |
| 💪 Current per ESC |
20A, 25A, or 30A continuous (varies by model) |
| 🔥 Burst Current |
40A per channel (10 seconds) |
| 🔋 Input Voltage |
2-6S LiPo (7.4V – 22.2V) |
| 🔌 BEC Output 1 |
5V @ 2-3A (for flight controller, receiver) |
| 🔌 BEC Output 2 |
12V @ 1-2A (for FPV camera, VTX) – optional |
| 🔄 Firmware |
SimonK, BLHeli, or BLHeli_S (varies by model) |
| 📊 Update Rate |
8kHz PWM frequency typical |
| 📏 Board Size |
36×36mm or 45×45mm typical |
| 🔩 Mounting Holes |
30.5×30.5mm or 45×45mm M3 spacing |
| ⚖️ Weight |
~15-30 grams (depends on size/rating) |
| 🌡️ Operating Temp |
-20°C to +80°C |
| 🔌 Motor Outputs |
Solder pads or direct wire connections |
🔋 Typical Power Distribution Features
| Battery Input |
XT60, XT90, or solder pads for main power |
| ESC Outputs |
4-8 integrated ESC circuits (direct to motors) |
| 5V BEC Output |
Powers flight controller, receiver, GPS |
| 12V BEC Output |
Powers FPV camera, video transmitter (if included) |
| LED Pads |
Connection points for LED strips (some models) |
| Current Sensor |
Onboard current monitoring (some models) |
| Voltage Sensor |
Battery voltage monitoring output (some models) |
🎯 Perfect For
- 🎮 Racing Drones – 250-350mm frames, minimal weight crucial
- 🚁 Compact Builds – Limited space for electronics
- 📹 FPV Quadcopters – Clean wiring for FPV systems
- 🔧 DIY Builders – Simplifies build process significantly
- 🏫 Educational Projects – Easier to understand and build
- 💰 Budget Builds – Often cheaper than separate ESCs
- ⚙️ Professional Builds – Clean, reliable power management
- 🚁 Hex/Octocopters – 6-8 channel versions available
🆚 Integrated PDB vs Separate ESCs
| Feature |
Integrated PDB+ESC |
Separate ESCs |
| Weight |
✅ Lighter (one board) |
⚠️ Heavier (4 units) |
| Wiring |
✅ Minimal, clean |
⚠️ Complex, messy |
| Failure Risk |
⚠️ All ESCs on one board |
✅ Isolated failures |
| Replacement |
⚠️ Replace entire board |
✅ Replace one ESC |
| Heat Dissipation |
⚠️ Concentrated heat |
✅ Distributed cooling |
| Cost |
✅ Often cheaper |
⚠️ More expensive |
| Installation |
✅ Faster, easier |
⚠️ More time consuming |
| Best For |
Racing, compact builds |
Reliability, large frames |
✅ Key Advantages
- 📦 All-in-One Solution – ESC + power distribution + voltage regulation
- ⚖️ Weight Savings – Significantly lighter than separate components
- 🔌 Simplified Wiring – One battery connection, direct motor outputs
- 🔧 Faster Assembly – Reduces build time by 30-50%
- 🛡️ Clean Build – Professional appearance, less wire clutter
- ⚡ Integrated BEC – No need for separate voltage regulators
- 💰 Cost Effective – Often $10-30 cheaper than separate ESCs
- 📊 Matched ESCs – All ESCs identical specs, balanced performance
- 🔄 Firmware Updates – Update all ESCs simultaneously
- 📏 Space Efficient – Fits tight spaces in small frames
⚠️ Important Limitations
- 🔥 Heat Concentration – All ESCs generate heat in one spot
- ⚠️ Single Point of Failure – One board failure = all ESCs down
- 💰 Costly Replacement – Must replace entire board if one ESC fails
- 🔧 Limited Customization – Cannot mix different ESC ratings
- 📏 Fixed Configuration – Cannot easily adapt for different motor counts
- 🌡️ Cooling Requirements – May need active cooling on large builds
- ⚡ Current Limitations – Limited to board’s max current rating
- 🔌 Soldering Required – All connections must be soldered (no quick connectors)
🔧 Installation Guide
| 1. Mount PDB |
Install on frame using M3 screws (30.5mm or 45mm spacing) |
| 2. Solder Battery Lead |
Connect XT60/XT90 connector or direct battery wires to + and – |
| 3. Connect Motors |
Solder 3 motor wires to each ESC output (12 wires total for quad) |
| 4. Signal Wires to FC |
Connect ESC signal wires to flight controller motor outputs |
| 5. Power Flight Controller |
Connect 5V BEC output to FC power input |
| 6. Optional 12V |
Connect 12V BEC to FPV camera/VTX if available |
| 7. Test Motors |
Verify all motors spin correctly (without props!) |
| 8. Secure Wiring |
Use zip ties, heat shrink to organize and protect wires |
🔌 Wiring Configuration
| Battery (+) Pad |
→ LiPo battery positive (red wire) |
| Battery (-) Pad |
→ LiPo battery negative (black wire) |
| Motor 1-4 Pads |
→ Brushless motor 3-phase wires (3 per motor) |
| Signal Wires |
→ Flight controller M1, M2, M3, M4 outputs |
| 5V BEC Out |
→ FC 5V input, receiver power |
| 12V BEC Out |
→ FPV camera, VTX power (if available) |
| GND Pads |
→ Common ground for all components |
💡 Pro Tips
- 🌡️ Ensure Airflow – Mount where props provide cooling airflow
- 🔌 Use Quality Solder – High-current connections need good solder joints
- 📏 Short Motor Wires – Keep motor wires as short as possible (reduces interference)
- 🔋 Verify Polarity – Double-check battery +/- before connecting
- ⚡ Current Headroom – Use 30A PDB for motors drawing 20A max
- 🛡️ Heat Shrink Protection – Cover all exposed solder joints
- 🔧 Test Before Flight – Verify all ESCs working before maiden flight
- 📦 Keep Spares – Have backup PDB in case of failure
🔋 BEC Output Usage
| 5V BEC |
Typical Use |
Current Draw |
| Flight Controller |
Main FC power |
~200-500mA |
| RC Receiver |
Radio control |
~50-150mA |
| GPS Module |
Navigation |
~50-100mA |
| LED Lights |
Navigation lights |
~100-300mA |
| Total 5V Load |
All devices |
< 2-3A max |
| 12V BEC |
Typical Use |
Current Draw |
| FPV Camera |
Video recording |
~100-200mA |
| Video Transmitter |
FPV video link |
~200-400mA |
| OSD Module |
On-screen display |
~50-100mA |
| Total 12V Load |
All devices |
< 1-2A max |
🔍 Troubleshooting
| One Motor Not Working |
Check solder joints on that ESC, test motor separately |
| All Motors Dead |
Check battery connection, verify 5V BEC working |
| FC Not Powering On |
Check 5V BEC output with multimeter, verify connections |
| Motor Direction Wrong |
Swap any 2 of 3 motor wires to reverse direction |
| Board Overheating |
Reduce throttle, check for short circuits, improve airflow |
| Intermittent Power |
Check battery connector solder joints, tighten connections |
| BEC Failure |
Overloaded (>2-3A), board may need replacement |
🛡️ Safety Features (Typical)
| Overcurrent Protection |
Shuts down if current exceeds safe limits |
| Low Voltage Cutoff |
Protects battery from over-discharge |
| Thermal Protection |
Reduces power if board temperature too high |
| Reverse Polarity |
Protection against backwards battery connection (some models) |
| Short Circuit Protection |
Prevents damage from wiring errors |
📦 Package Contents (Typical)
- ✅ 1x ESC Power Distribution Board (4/6/8 channel)
- ✅ Pre-soldered or ready-to-solder ESC outputs
- ✅ Integrated 5V BEC (2-3A output)
- ✅ Integrated 12V BEC (some models, 1-2A output)
- ✅ M3 mounting screws (may be included)
- ⚠️ Note: Battery connector sold separately (XT60/XT90)
- ⚠️ Note: Motor wires not included (must be soldered)
- ⚠️ Note: Signal wires to FC may not be included
- ⚠️ Note: Frame and motors sold separately
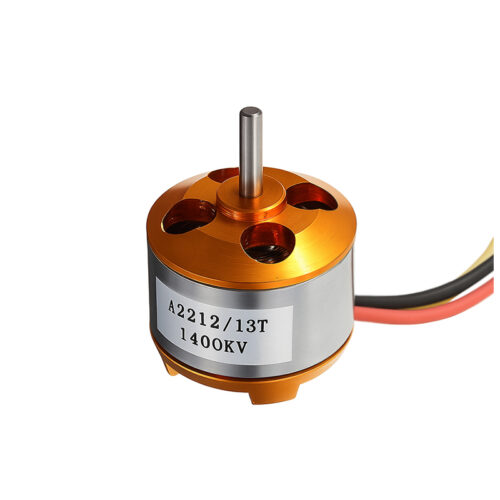
🔧 Compatible Configurations
| Board Type |
Motors |
Frame Size |
Application |
| 4-in-1 20A |
2204-2206 2300KV |
210-250mm |
Racing drones |
| 4-in-1 30A |
2212 1000KV |
330-450mm |
Freestyle, photography |
| 6-in-1 25A |
2204 2300KV |
400-500mm |
Hexacopter builds |
| 8-in-1 20A |
2204 2300KV |
500-650mm |
Octocopter platforms |
💰 Cost Comparison
- 💵 Integrated PDB – $30-50 (4-in-1 with 20-30A ESCs)
- 💵 Separate ESCs (4×) – $40-80 (4× individual 30A ESCs)
- 💵 Separate PDB – $5-15 (basic power distribution only)
- 💰 Total Savings – $15-45 using integrated solution
- ⚖️ Weight Savings – 20-40 grams lighter than separate ESCs + PDB
🎓 Example Racing Quad Build (with PDB)
- 🚁 Frame – 250mm carbon fiber racing frame
- 🔄 Motors – 4× 2204 2300KV brushless
- ⚡ PDB/ESC – 4-in-1 30A ESC PDB with BLHeli_S
- 🚁 Propellers – 5×4.5 inch (3-blade racing props)
- 🔋 Battery – 4S 1300-1500mAh LiPo
- 📡 Flight Controller – F4/F7 with Betaflight
- ⏱️ Flight Time – 4-6 minutes racing
- 💰 PDB Cost – $35-45 typical
🔧 Firmware Options
- 🔄 SimonK – Open-source, fast response, multi-rotor optimized
- ⚡ BLHeli – Advanced features, configurable via software
- 🚀 BLHeli_S – Enhanced BLHeli, better performance, more protocols
- 💻 BLHeli_32 – ARM-based, highest performance (premium models)
- 🔌 OneShot125/MultiShot – Fast ESC protocols for racing
- 📡 DShot – Digital protocol, no calibration needed (BLHeli_S/32)
🛡️ Product Information
✅ ESC Power Distribution Board – Integrated Multi-Rotor Power System
✅ Configuration: 4-in-1 (quad), 6-in-1 (hex), or 8-in-1 (octo)
✅ ESC rating: 20A, 25A, or 30A continuous per channel (varies by model)
✅ Burst current: 40A per channel (10 seconds typical)
✅ Input voltage: 2-6S LiPo (7.4V – 22.2V)
✅ BEC outputs: 5V @ 2-3A (FC/RX), 12V @ 1-2A (FPV) – model dependent
✅ Firmware: SimonK, BLHeli, or BLHeli_S (varies by model)
✅ Mounting: 30.5×30.5mm or 45×45mm M3 hole spacing
✅ Weight: ~15-30 grams (depends on size and rating)
✅ Protection: Overcurrent, low voltage, thermal, short circuit
✅ Operating temperature: -20°C to +80°C
✅ All-in-one solution: ESC + PDB + BEC voltage regulation
⚠️ Important: All connections must be soldered – no quick connectors. Verify battery polarity before connecting (reverse polarity can damage board). Ensure adequate cooling/airflow to prevent overheating. Use appropriate current rating for your motors (30% headroom recommended). Do not exceed BEC current limits (5V: 2-3A max, 12V: 1-2A max). Keep motor wires short to reduce electromagnetic interference. Test all motors without propellers before flight. Single point of failure – board failure disables all ESCs. Heat shrink all exposed solder joints. Mount board where propwash provides cooling. Firmware updates may require special adapter/programmer. Not suitable for very large motors (>2216 size typically). Best for: Racing drones, compact builds, 250-450mm frames, weight-critical applications.