Description
🔧 KK 2.1.5 Multi-Rotor LCD Flight Controller Board – Self-Leveling Autopilot for Drones
The KK 2.1.5 Multi-Rotor LCD Flight Controller Board is a popular, user-friendly flight control system featuring an integrated LCD screen, 3-axis gyroscope, and 3-axis accelerometer for stable, self-leveling flight. This standalone flight controller requires no computer setup – all configuration is done through the onboard LCD display and four buttons. Supporting quadcopter, hexacopter, and octocopter configurations with multiple flight modes including self-level, acro, and auto-disarm. Perfect for beginners building their first drone, hobbyists seeking simple setup, and pilots who prefer straightforward, computer-free configuration with proven stability performance.
✨ Key Highlights
- 📺 Built-in LCD Screen – No computer needed for setup
- 🎮 4-Button Interface – Easy menu navigation and configuration
- ⚖️ Self-Leveling – 3-axis gyro + 3-axis accelerometer
- 🔄 Atmega644PA Processor – Powerful 8-bit microcontroller
- 🚁 Multi-Configuration – Quad, Hex, Octo support (X and + modes)
- 📊 Real-Time Display – Live sensor data on LCD
- 🛡️ Auto-Disarm Feature – Safety motor cutoff
- 🔧 Simple Setup – Beginner-friendly configuration
- 💰 Cost-Effective – Affordable flight controller option
- ⚡ Direct ESC Output – No external mixer needed
📊 Technical Specifications
| 💻 Processor |
Atmega644PA (8-bit, 16MHz) |
| 🔄 Gyroscope |
3-axis MPU-6050 (or equivalent) |
| 📐 Accelerometer |
3-axis MPU-6050 (integrated) |
| 📺 Display |
128×64 LCD with backlight |
| 🎮 Input Channels |
4-8 channels (receiver input) |
| 🔌 Output Channels |
8 motor outputs (ESC) |
| ⚡ Operating Voltage |
4.8V – 6V (from receiver or BEC) |
| 🔋 Current Draw |
~20mA typical |
| 📏 Board Size |
50.5×50.5mm (45mm mounting holes) |
| ⚖️ Weight |
~21 grams |
| 🔄 Update Rate |
~1000Hz gyro loop |
| 🛡️ Firmware |
V1.19S1 (latest version) |
🚁 Supported Multi-Rotor Configurations
| Quadcopter X |
4 motors in X configuration (most common) |
| Quadcopter + |
4 motors in + configuration |
| Hexacopter X |
6 motors in X configuration |
| Hexacopter + |
6 motors in + configuration |
| Hexacopter Y6 |
6 motors (coaxial configuration) |
| Octocopter X |
8 motors in X configuration |
| Octocopter + |
8 motors in + configuration |
🎯 Perfect For
- 🎓 Beginner Builds – First-time drone builders, no PC required
- 🚁 DIY Quadcopters – 250-650mm frame sizes
- 🔬 Educational Projects – Schools, STEM programs, workshops
- 🛠️ Simple Setups – Pilots who prefer LCD over computer config
- ✈️ Trainer Drones – Learning to fly with self-level mode
- 🏫 Classroom Builds – Easy demonstration and setup
- 🔧 Quick Prototyping – Fast configuration for testing
- 💰 Budget Builds – Cost-effective flight controller option
🎮 Flight Modes Available
| Self-Level Mode |
Auto-levels using accelerometer (beginner mode) |
| Acro Mode |
Gyro only, no auto-level (advanced flying) |
| Auto-Disarm |
Automatic motor cutoff after landing |
| Switchable Modes |
Toggle self-level on/off via transmitter |
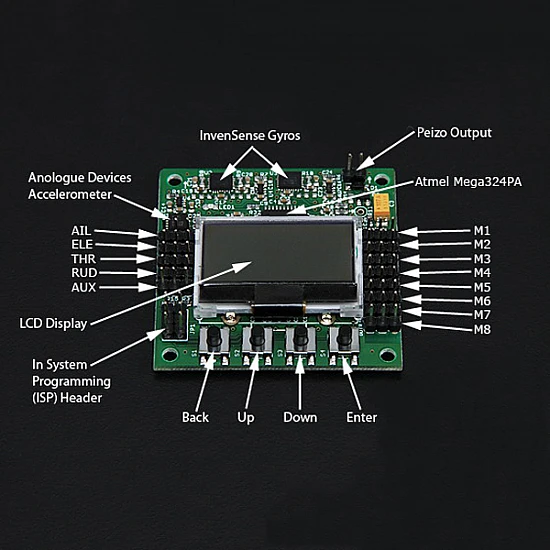
🔌 Pin Configuration
| Receiver Inputs |
THRO, AILE, ELEV, RUDD, AUX1-4 (8 channels max) |
| Motor Outputs |
M1-M8 (ESC connections, depends on config) |
| Power Input |
+5V and GND from receiver or BEC |
| ISP Port |
For firmware updates (6-pin header) |
✅ Key Advantages
- 📺 LCD Display – No computer needed, configure on the spot
- 🎮 Simple Interface – 4 buttons for complete control
- ⚖️ Self-Leveling – Stable flight for beginners
- 🔧 Easy Setup – 15-30 minutes from unboxing to flying
- 💰 Affordable – Budget-friendly for first builds
- 📊 Real-Time Info – See sensor data, settings instantly
- 🛡️ Proven Design – Thousands of successful builds
- 🔄 No Calibration Hassle – Simple gyro/acc calibration on LCD
- 📚 Large Community – Extensive tutorials and support
- ⚡ Standalone – Works independently, no PC dependency
⚠️ Important Notes
- 💻 No GPS Support – Basic stabilization only, no GPS features
- 📡 No Telemetry – No wireless data transmission capability
- 🔋 Power from Receiver – Needs 5V from RX or separate BEC
- 🎮 6-Channel Minimum – Requires at least 6-channel transmitter
- ⚖️ Limited Features – Basic compared to modern FCs (no RTH, waypoints)
- 🔧 Orientation Critical – Must be mounted correctly (arrows forward)
- 📐 Level Mounting – Board must be level for accurate self-leveling
- 🔄 Firmware Updates – Requires ISP programmer for updates
🔧 Basic Setup Procedure
| 1. Power Connection |
Connect 5V power from receiver or BEC |
| 2. Select Configuration |
Use LCD menu to choose frame type (Quad X, etc.) |
| 3. Receiver Calibration |
Calibrate stick endpoints via LCD menu |
| 4. Gyro Calibration |
Place level, run gyro calibration (board must be still) |
| 5. Accelerometer Cal |
Calibrate accelerometer on level surface |
| 6. ESC Calibration |
Calibrate ESCs through transmitter |
| 7. PI Settings |
Adjust PI gains for your frame (start with defaults) |
| 8. Test Flight |
Start in self-level mode, test controls |
🔧 Required Components
- 🚁 Multi-Rotor Frame – Quad/hex/octo (250-650mm)
- 🔄 Brushless Motors – 4-8 motors (depends on configuration)
- ⚡ ESCs – 4-8 ESCs (20-30A typical)
- 🚁 Propellers – Matched to motors and frame
- 🔋 LiPo Battery – 2S-4S (depends on motor choice)
- 📻 RC Transmitter – 6+ channel radio (8-channel recommended)
- 📡 RC Receiver – Compatible with transmitter
- 🔌 5V BEC (optional) – If ESCs don’t provide 5V to receiver
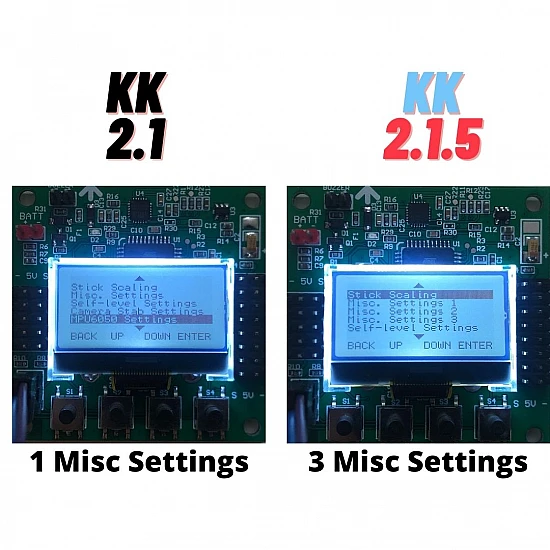
📺 LCD Menu Structure
🔍 Troubleshooting
| No LCD Display |
Check 5V power connection, verify polarity |
| Motors Not Arming |
Check throttle at zero, verify stick calibration |
| Drift in Self-Level |
Re-calibrate accelerometer on level surface |
| Oscillations |
Reduce P gains in PI editor |
| Sluggish Response |
Increase P gains slightly |
| Wrong Motor Spinning |
Verify mixer configuration, check motor order |
| Receiver Not Detected |
Check RX connections, run receiver test |
💡 Pro Tips
- 🔧 Start with Defaults – Use default PI settings, tune later if needed
- 📐 Level Mounting – Use bubble level to ensure FC is perfectly level
- 🎮 Self-Level First – Always test in self-level mode before acro
- 🔋 Clean Power – Use filtered 5V, avoid ESC noise interference
- ⚖️ Balance Props – Balanced props reduce vibrations, improve performance
- 🛡️ Foam Mounting – Use double-sided foam to dampen vibrations
- 📺 Read LCD Carefully – All settings shown on screen during config
- 🔄 Test Inputs First – Verify all channels before connecting motors
🎮 Transmitter Requirements
| Minimum Channels |
6 channels (TAER + 2 AUX) |
| Recommended |
8+ channels for full features |
| Mode Switch |
2 or 3-position switch for self-level toggle |
| Arming Method |
Throttle down + rudder right (configurable) |
🔧 PI Tuning Basics
| P Gain (Roll/Pitch) |
Start 4.5-5.0, increase for responsiveness |
| I Gain (Roll/Pitch) |
Start 0.02-0.03, helps hold position |
| P Gain (Yaw) |
Start 6.0-7.0, adjust for yaw response |
| Oscillations |
Reduce P gain by 0.5 increments |
| Sluggish |
Increase P gain by 0.5 increments |
📦 Package Contents
- ✅ 1x KK 2.1.5 Flight Controller Board with LCD
- ✅ Pre-installed firmware (V1.19S1 or similar)
- ✅ 4 navigation buttons integrated on board
- ⚠️ Note: Receiver, motors, ESCs sold separately
- ⚠️ Note: Mounting hardware not included
- ⚠️ Note: Power cable/connectors may not be included
- ⚠️ Note: ISP programmer needed for firmware updates (sold separately)
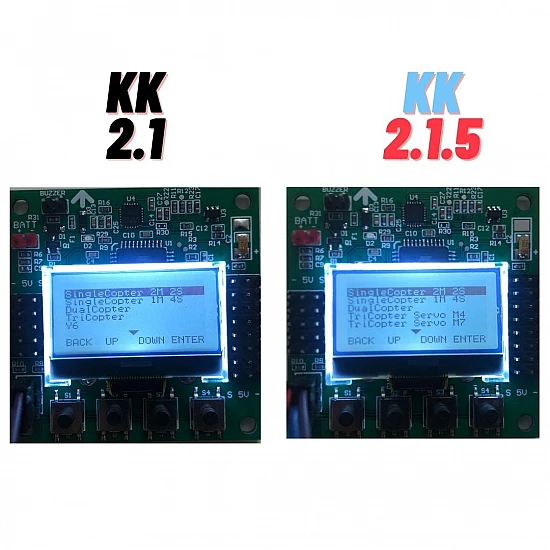
🆚 KK 2.1.5 vs Modern Flight Controllers
| Feature |
KK 2.1.5 |
Modern FC |
| Setup Method |
✅ LCD (no PC) |
Computer software |
| GPS Support |
❌ No |
✅ Yes (RTH, waypoints) |
| Telemetry |
❌ No |
✅ Yes (OSD, data) |
| Learning Curve |
✅ Easy (beginner) |
Steeper |
| Cost |
✅ Low ($15-25) |
Higher ($30-100+) |
| Best For |
Beginners, simple builds |
Advanced features |
🎓 Example Quadcopter Build (KK 2.1.5)
- 🚁 Frame – F450 (450mm wheelbase)
- 🔄 Motors – 4× 2212 1000KV brushless
- ⚡ ESCs – 4× 30A SimonK
- 🚁 Propellers – 10×4.5 inch (2 CW + 2 CCW)
- 🔋 Battery – 3S 3300mAh 30C LiPo
- 📻 Transmitter – FlySky FS-i6 (6 channel)
- 📡 Receiver – FS-iA6B (6 channel)
- 💰 Total Cost – ~$200-250 complete build
🔧 Motor Mixing Examples
- 🚁 Quad X – Most common, diagonal motor pairs
- 🚁 Quad + – Motors aligned with frame arms
- ⚙️ Hex X – 6 motors, better payload capacity
- ⚙️ Hex Y6 – 6 motors coaxial, compact footprint
- 💪 Octo X – 8 motors, maximum lift and redundancy
🔋 Power Supply Notes
- ⚡ Voltage Range – 4.8V-6V (typically 5V from receiver)
- 🔌 Current Draw – ~20mA (very low power)
- 🔋 Power Source – Receiver 5V output or separate 5V BEC
- ⚠️ Avoid ESC BEC – Can be noisy, use filtered power if possible
- 🛡️ Backup Power – Some use separate BEC for FC reliability
🛡️ Product Information
✅ KK 2.1.5 Multi-Rotor LCD Flight Controller Board
✅ Atmega644PA processor – 8-bit, 16MHz microcontroller
✅ Integrated 128×64 LCD display with backlight
✅ 3-axis gyroscope + 3-axis accelerometer (MPU-6050)
✅ 4-button interface for complete configuration (no PC needed)
✅ Self-leveling and acro flight modes available
✅ Supports: Quad X/+, Hex X/+/Y6, Octo X/+ configurations
✅ 4-8 receiver input channels, 8 motor output channels
✅ Operating voltage: 4.8V-6V (5V nominal from receiver/BEC)
✅ Board size: 50.5×50.5mm with 45mm mounting holes
✅ Weight: ~21 grams
✅ Firmware: V1.19S1 (latest version pre-installed)
✅ Auto-disarm feature for safety
⚠️ Important: No GPS or advanced features (basic stabilization only). Requires 6+ channel transmitter for full functionality. Power from receiver 5V or separate 5V BEC. Board MUST be mounted level and oriented correctly (arrow forward). Calibrate gyro and accelerometer before first flight. Does not support telemetry, OSD, or GPS features. Firmware updates require ISP programmer (not included). Use self-level mode for beginners. PI tuning may be needed for optimal performance. Minimum 6 channels: Throttle, Aileron, Elevator, Rudder, Mode Switch, Arm Switch. Compatible with standard PWM receivers and ESCs. Not compatible with OneShot, MultiShot, or DShot protocols.