Description
🔧 GPS NEO-M8N Module – High-Precision GNSS Navigation Module with Compass
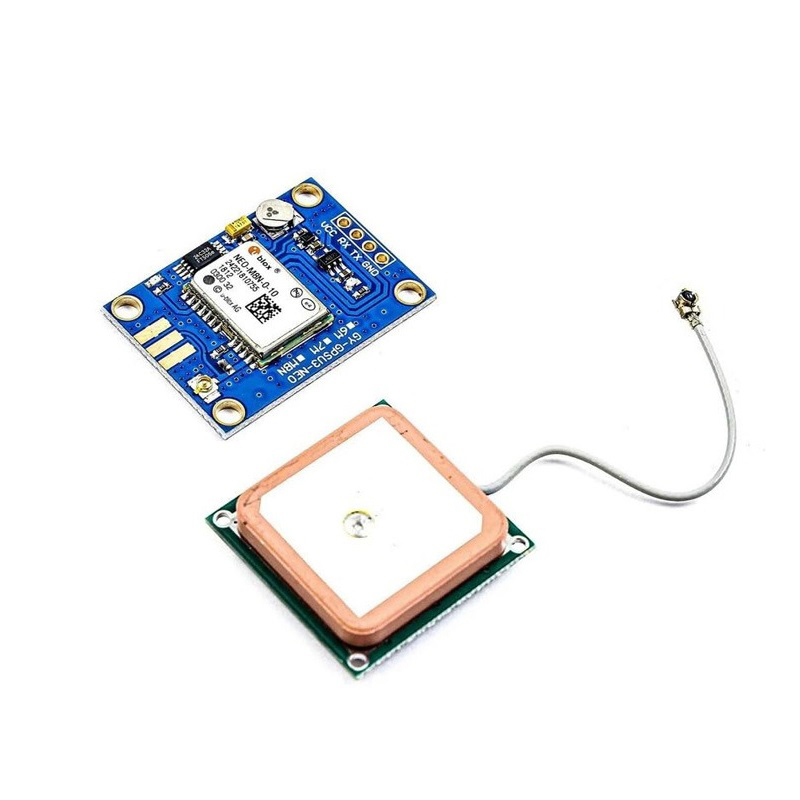
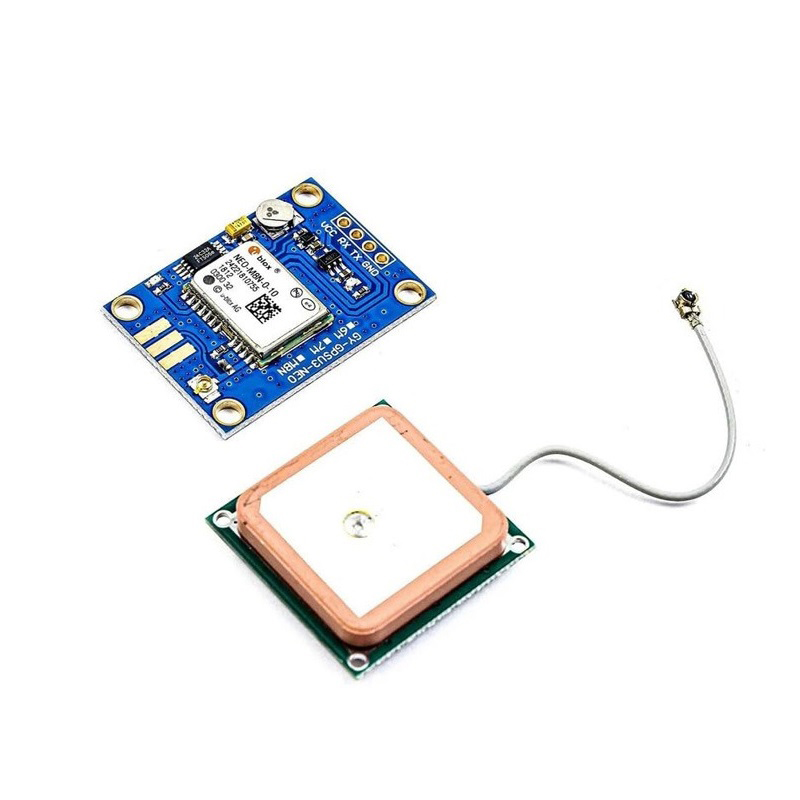
The GPS NEO-M8N Module is a high-performance u-blox M8 engine GNSS (Global Navigation Satellite System) receiver with integrated HMC5883L/QMC5883L compass, designed for drones, quadcopters, robotics, and navigation applications. Featuring concurrent reception of GPS, GLONASS, Galileo, and BeiDou satellites, this module delivers superior positioning accuracy (2.5m CEP) with fast acquisition times. The built-in compass provides accurate heading information for autonomous navigation. Perfect for flight controllers (Pixhawk, APM, iNav), autonomous vehicles, position hold, return-to-home functionality, and precision GPS applications requiring reliable satellite reception.
✨ Key Highlights
- 🛰️ u-blox NEO-M8N Chip – Industry-leading GPS module
- 🌍 Multi-GNSS Support – GPS, GLONASS, Galileo, BeiDou
- 📍 High Accuracy – 2.5m CEP positioning precision
- 🧭 Built-in Compass – HMC5883L/QMC5883L magnetometer
- ⚡ Fast Acquisition – Cold start <26s, hot start <1s
- 📡 Active Ceramic Antenna – 25×25mm high-gain antenna
- 🔌 UART + I2C Interface – GPS via serial, compass via I2C
- 🔋 Low Power – 67mA @ 3.3V typical operation
- 📊 Update Rate – Up to 10Hz position updates
- ✈️ Flight Controller Compatible – Pixhawk, APM, iNav, Betaflight
📊 Technical Specifications
| 🛰️ GPS Chip |
u-blox NEO-M8N |
| 🧭 Compass Chip |
HMC5883L or QMC5883L |
| 🌍 GNSS Support |
GPS, GLONASS, Galileo, BeiDou |
| 📍 Position Accuracy |
2.5m CEP (autonomous) |
| ⚡ Cold Start Time |
<26 seconds |
| 🔄 Hot Start Time |
<1 second |
| 📊 Update Rate |
1Hz default, 10Hz max |
| 🔌 Interface |
UART (GPS) + I2C (Compass) |
| ⚡ Operating Voltage |
3.3V – 5V DC |
| 🔋 Current Draw |
67mA @ 3.3V (typical) |
| 📡 Antenna |
25×25mm active ceramic patch |
| 🌡️ Operating Temp |
-40°C to +85°C |
| 📏 Module Size |
~50×50×15mm (with antenna) |
| ⚖️ Weight |
~15 grams |
🌍 GNSS Constellation Support
| GPS (USA) |
L1C/A frequency – Global coverage |
| GLONASS (Russia) |
L1OF frequency – Enhanced coverage |
| Galileo (EU) |
E1B/C frequency – High accuracy |
| BeiDou (China) |
B1I frequency – Asia-Pacific focus |
| Concurrent Reception |
Up to 3 systems simultaneously |
| Satellites Tracked |
Up to 72 channels |
🎯 Perfect For
- 🚁 Drones/Quadcopters – Position hold, waypoint navigation, RTH
- ✈️ Fixed-Wing Aircraft – Autonomous flight, mission planning
- 🤖 Autonomous Vehicles – Rovers, boats, ground vehicles
- 📡 Flight Controllers – Pixhawk, APM, iNav, Ardupilot integration
- 🧭 Navigation Systems – GPS tracking, asset monitoring
- 📊 Data Logging – Geographic data collection, mapping
- 🔬 Research Projects – GPS experimentation, testing
- ⚙️ Industrial IoT – Fleet tracking, equipment location
🔌 Pin Configuration
| VCC |
Power input (3.3V – 5V) |
| GND |
Ground connection |
| TX (TXD) |
UART transmit (GPS data output) |
| RX (RXD) |
UART receive (GPS commands input) |
| SCL |
I2C clock (compass communication) |
| SDA |
I2C data (compass communication) |
🔧 Compatible Flight Controllers
| Pixhawk Family |
Pixhawk 1/2/4, Cube, Pixhawk Mini |
| APM Series |
APM 2.6, APM 2.8 (ArduPilot) |
| iNav |
F4, F7 flight controllers with GPS support |
| Betaflight |
F4/F7 boards with GPS firmware |
| CC3D |
With GPS firmware (limited features) |
| Naze32 |
Rev6 with GPS support |
| Generic UART |
Any FC with available UART port |
✅ Key Advantages
- 🛰️ Multi-GNSS – GPS+GLONASS+Galileo+BeiDou for better coverage
- 📍 High Accuracy – 2.5m CEP better than older GPS modules
- ⚡ Fast Lock – Cold start <26s, hot start <1s acquisition
- 🧭 Integrated Compass – No separate magnetometer needed
- 📡 Active Antenna – Better signal reception than passive
- 🔋 Low Power – Only 67mA current draw
- 🌍 Global Coverage – Works worldwide with multiple systems
- 📊 10Hz Update – Fast position updates for dynamic applications
- 💰 Cost-Effective – Professional performance, affordable price
- 🔌 Plug-and-Play – Easy connection to flight controllers
⚠️ Important Notes
- 🛰️ Clear Sky View – Needs unobstructed view of sky for best performance
- 🧭 Compass Calibration – Must calibrate compass before flight
- ⚡ Power Supply – Use clean, stable 3.3V or 5V power
- 📡 Antenna Position – Mount antenna away from metal, motors, ESCs
- 🔌 Voltage Compatibility – Module accepts 3.3V or 5V, check FC output
- 🧭 Magnetic Interference – Keep compass away from power wires, batteries
- 🌡️ Cold Start – First lock takes longer, subsequent faster
- 🔧 Mounting – Use foam or standoffs to reduce vibration
🔧 Connection to Flight Controller
| GPS VCC |
→ FC 5V or 3.3V output |
| GPS GND |
→ FC GND |
| GPS TX |
→ FC UART RX (GPS port) |
| GPS RX |
→ FC UART TX (GPS port) |
| Compass SCL |
→ FC I2C SCL |
| Compass SDA |
→ FC I2C SDA |
📊 GPS Performance Metrics
🔍 Troubleshooting
| No GPS Lock |
Check antenna position, ensure clear sky view |
| Slow Lock Time |
Normal for cold start, wait 1-2 minutes outdoors |
| No Compass Data |
Verify I2C connections (SCL/SDA), enable in FC |
| Compass Errors |
Calibrate compass, move away from interference |
| Poor Accuracy |
Increase satellite count, check HDOP value |
| GPS Not Detected |
Check UART baud rate (9600 or 38400), verify TX/RX |
| Intermittent Signal |
Check power supply stability, antenna connection |
💡 Pro Tips
- 🛰️ Outdoor Testing – Always test GPS outdoors for initial lock
- 📡 Antenna Placement – Mount on top of drone, clear view upward
- 🧭 Compass Away from Metal – Minimum 5cm from power wires, motors
- 🔌 Separate Power – Use filtered power, avoid sharing with noisy ESCs
- ⏱️ Wait for Lock – Allow 1-3 minutes for first GPS lock
- 📊 Check Satellite Count – Need 6+ satellites for good position
- 🔧 Foam Mounting – Use double-sided foam to reduce vibration
- 🧭 Calibrate Outdoors – Compass calibration must be done outside
🔧 Configuration Settings
| Baud Rate |
9600 or 38400 bps (default 9600) |
| Update Rate |
1Hz default, configurable to 10Hz |
| GNSS Systems |
Configure via u-center software |
| NMEA Protocol |
Standard GPS data format output |
| UBX Protocol |
u-blox proprietary (more data) |
| Compass I2C Address |
0x1E (HMC5883L) or 0x0D (QMC5883L) |
🧭 Compass Calibration Procedure
| 1. Level Surface |
Place drone on flat, level ground outdoors |
| 2. Start Calibration |
Enter calibration mode in flight controller |
| 3. Rotate Horizontally |
Slowly rotate drone 360° on horizontal plane |
| 4. Rotate Vertically |
Rotate drone nose-up, tail-up positions |
| 5. All Orientations |
Move through all possible orientations slowly |
| 6. Save Calibration |
Complete calibration, save parameters |
📦 Package Contents
- ✅ 1x NEO-M8N GPS Module with integrated compass
- ✅ 1x Active ceramic patch antenna (25×25mm)
- ✅ 1x Connection cable (6-pin, length varies)
- ✅ Mounting holes on PCB for standoffs
- ⚠️ Note: Flight controller sold separately
- ⚠️ Note: Mounting hardware may not be included
- ⚠️ Note: Check connector type compatibility with FC
- ⚠️ Note: u-center software available free from u-blox
🎓 GPS Features for Drones
- 📍 Position Hold – Maintain GPS coordinates when hovering
- 🏠 Return to Home (RTH) – Automatic return to takeoff point
- 🗺️ Waypoint Navigation – Fly predetermined GPS routes
- 🔋 Low Battery RTH – Auto return when battery low
- 📡 Lost Signal RTH – Return if radio signal lost
- 🧭 Heading Lock – Maintain direction using compass
- 📊 Flight Logging – Record GPS path for analysis
- ⚙️ Loiter Mode – Circle around GPS point
🔧 Advanced Features
- 🛰️ SBAS Support – WAAS, EGNOS, MSAS augmentation
- 🔄 AssistNow – Faster fix with u-blox assistance
- 📊 Raw Data Output – For post-processing RTK
- 🧭 3-Axis Magnetometer – Full 3D compass capability
- ⚡ Low Power Modes – Power save for battery operation
- 📡 Configurable I/O – UART baud, update rate adjustable
🆚 NEO-M8N vs Older GPS Modules
| Feature |
NEO-M8N |
NEO-6M/7M |
| GNSS Systems |
GPS+GLONASS+Galileo+BeiDou |
GPS only (or GPS+GLONASS) |
| Accuracy |
2.5m CEP |
2.5-3m CEP |
| Sensitivity |
✅ -167 dBm |
-161 dBm |
| Cold Start |
✅ <26s |
~29s |
| Update Rate |
✅ Up to 10Hz |
Up to 5Hz |
| Current Draw |
67mA |
45-67mA |
🛡️ Product Information
✅ GPS NEO-M8N Module – High-Precision GNSS with Integrated Compass
✅ u-blox NEO-M8N GPS chip – industry-leading performance
✅ Multi-GNSS: GPS, GLONASS, Galileo, BeiDou support
✅ Position accuracy: 2.5m CEP autonomous positioning
✅ Integrated compass: HMC5883L or QMC5883L magnetometer
✅ Active ceramic antenna: 25×25mm high-gain patch antenna
✅ Cold start: <26 seconds, Hot start: <1 second
✅ Update rate: 1Hz default, configurable up to 10Hz
✅ Interface: UART (GPS data) + I2C (compass data)
✅ Operating voltage: 3.3V – 5V DC input
✅ Current consumption: 67mA @ 3.3V typical
✅ Up to 72 satellite channels tracked simultaneously
✅ Compatible with: Pixhawk, APM, iNav, Betaflight, Ardupilot
⚠️ Important: Requires clear sky view for GPS lock – will not work indoors. First GPS lock (cold start) takes 1-3 minutes outdoors. Compass MUST be calibrated before flight. Mount antenna away from metal objects, motors, ESCs (minimum 5cm). Use clean, stable power supply (3.3V or 5V). Check TX/RX connections – GPS TX goes to FC RX. Default baud rate: 9600 bps (some FCs use 38400). Compass I2C address: 0x1E (HMC5883L) or 0x0D (QMC5883L). Configure GNSS systems via u-center software for optimal performance. Allow GPS to achieve 6+ satellites before flight.